
2025/09 - Present
Chalmers University of Technology - Gothenburg, Sweden
PhD in Computer Science and Engineering (focus on High-Performance Computing and RISC-V).
About Chalmers University of Technology
About Chalmers University of Technology
2024/10 - 2025/02
University of Tokyo - Tokyo, Japan
Exchange student program.
About University of Tokyo
About University of Tokyo
2023/08 - now
Chalmers University of Technology - Gothenburg
Master's in High-Performance Computing, focusing on AI and robotics.
About Chalmers
About Chalmers
Currently pursuing a master's degree at Chalmers, specializing in high-performance computing and AI robotics.
2021/04 - 2023/08
Inceptio Technology - Shanghai
Worked on autonomous truck R&D, responsible for key technology implementation.
About Inceptio
About Inceptio

Developed autonomous truck systems at Inceptio, gaining deep experience in intelligent transportation and cutting-edge technology.
2019/12 - 2021/04
SenseTime EIG - Shanghai
Joined SenseTime, worked on educational robotics projects.
About Sensetime
About Sensetime
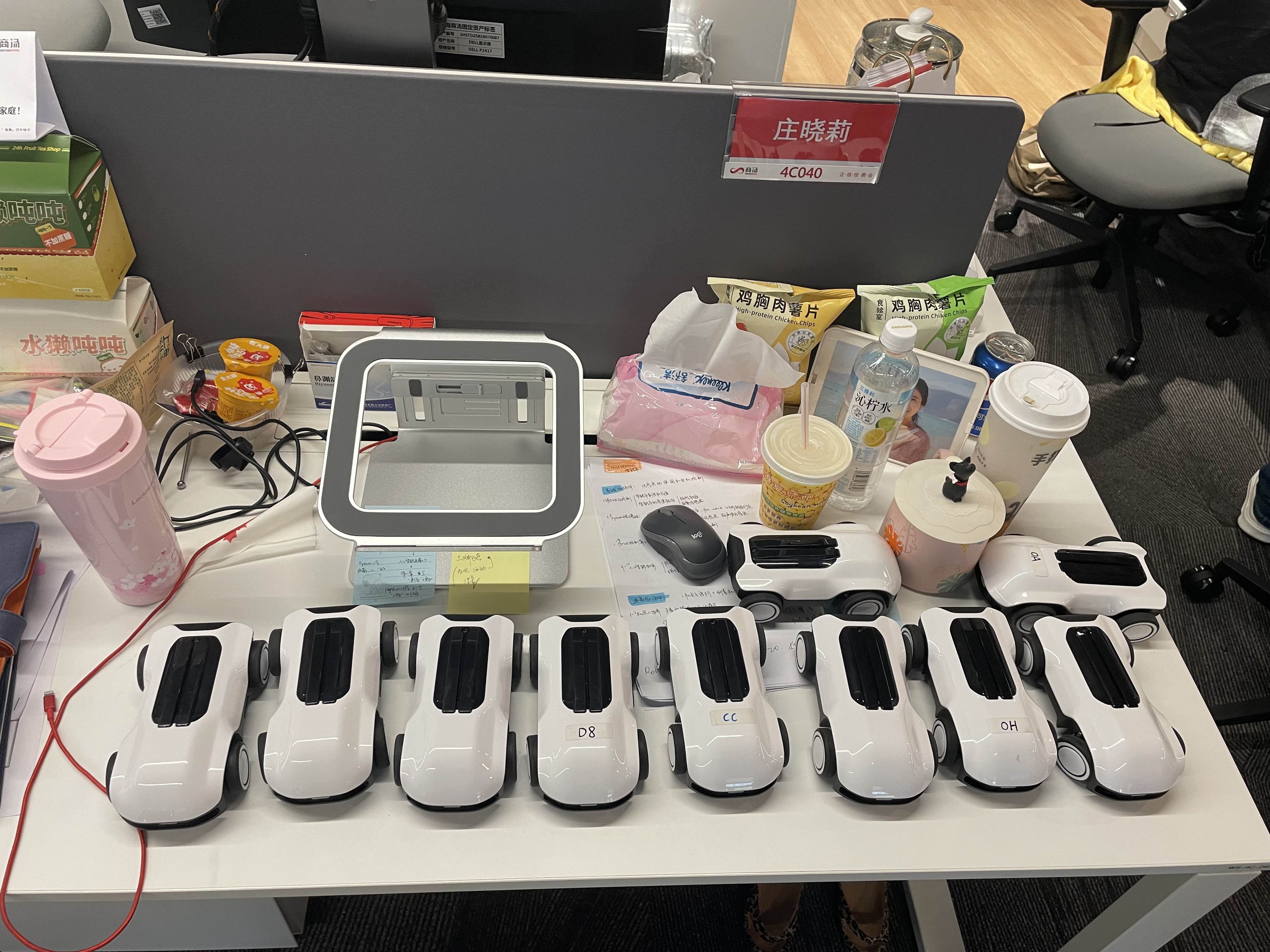
Worked on Rover Mini and other educational robotics projects, promoting AI and programming education.
2019/07 - 2019/12
South China Normal University & JIMI Technology
Bachelor's in Communication Engineering, internship at JIMI, worked on smart pipeline and automated warehouse systems.
About SCNU About JIMI
About SCNU About JIMI
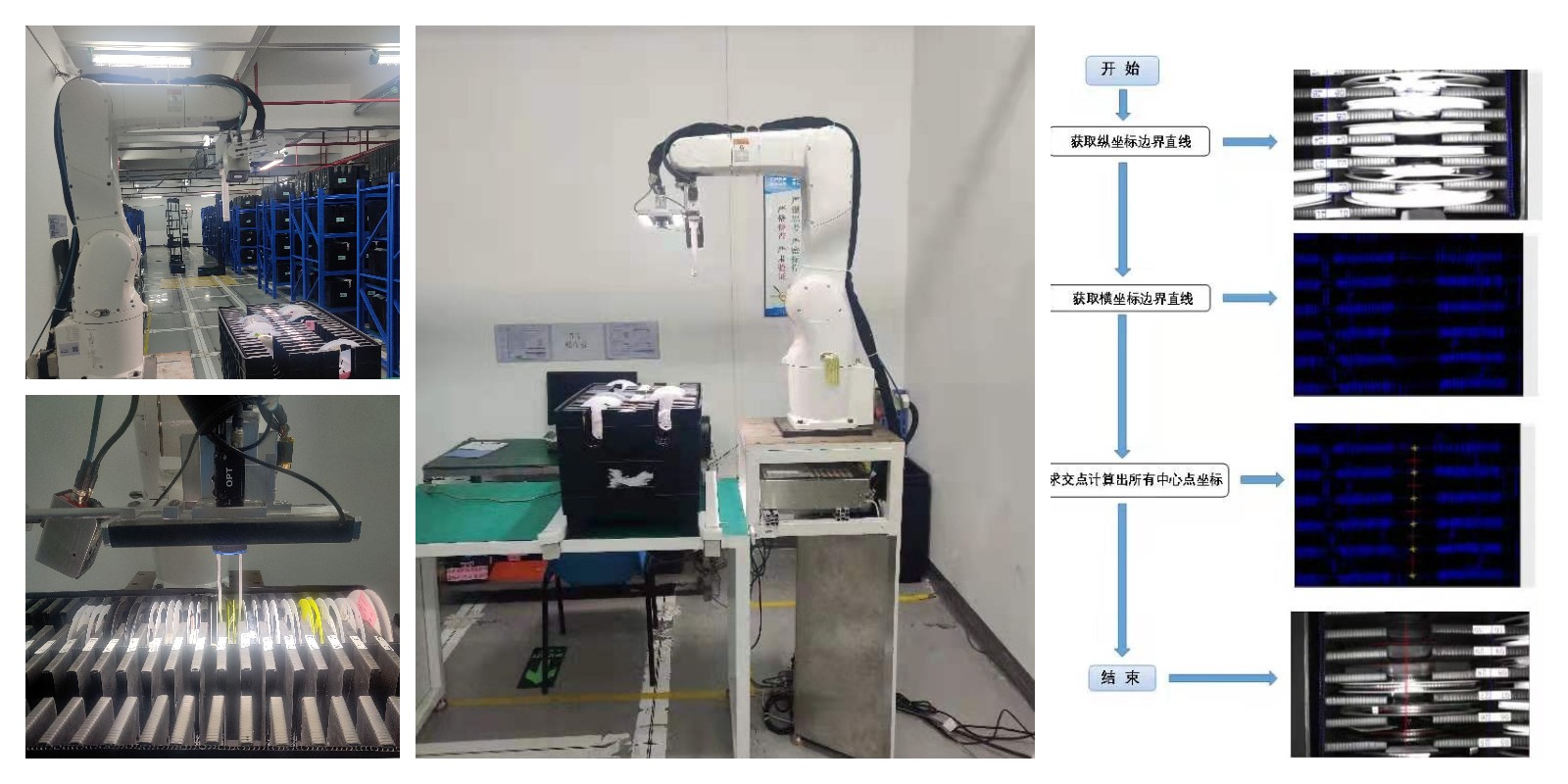
During the JIMI internship, participated in machine vision recognition projects, improving automation and algorithm skills.
2018
SenseTime MIG - Shenzhen
Research intern, participated in AI project development.
About Sensetime
About Sensetime
Interned at SenseTime Shenzhen, participated in AI prototype development and gained valuable engineering experience.






